คอลัมน์ ด้วยสมองและสองมือ: รถเข็นไฟฟ้าปรับยืน’เพื่อผู้พิการ’ผลงาน 3 สถาบัน

จิตอาสา’มทร.ธัญบุรี’ร่วมมือ สร้างศูนย์ฝึกอาชีพวัดไก่เตี้ย
1 ตุลาคม 2019
ภาพข่าว: วิรัช โหตระไวศยะ
4 ตุลาคม 2019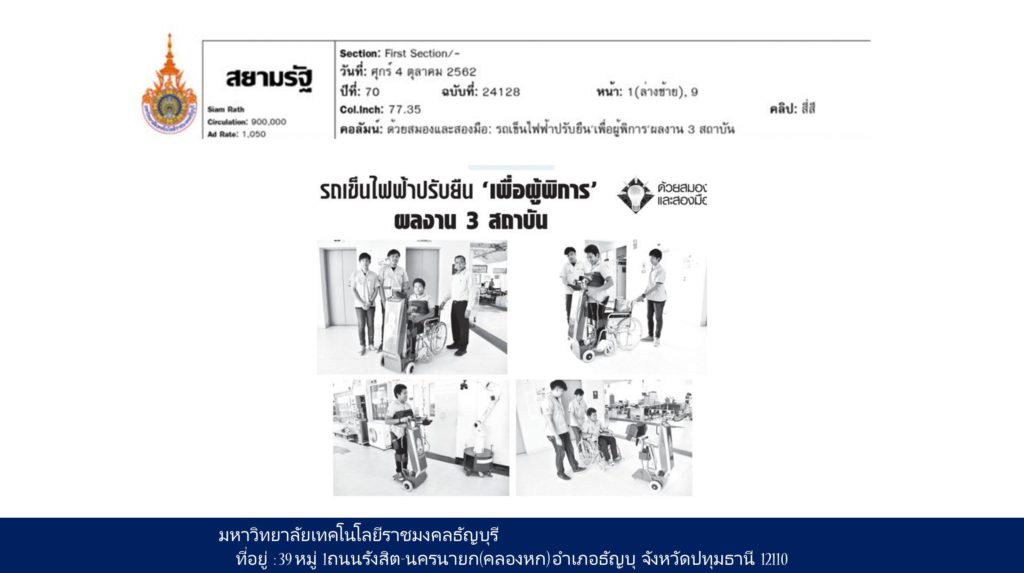
คอลัมน์ ด้วยสมองและสองมือ: รถเข็นไฟฟ้าปรับยืน’เพื่อผู้พิการ’ผลงาน 3 สถาบัน
สยามรัฐ ฉบับวันที่ 04 ตุลาคม พ.ศ. 2562
อีกหนึ่งผลงาน “รถเข็นไฟฟ้าแบบปรับยืนอเนกประสงค์เพื่อผู้พิการ”(PMK:Multipurpose Electric Powered Wheelchair) ผลงานความร่วมมือระหว่าง 3 สถาบัน นำโดย รศ.ดร.เดชฤทธิ์ มณีธรรม หัวหน้าสาขาวิศวกรรมเมคคาทรอนิกส์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี รศ.ดร.เบญจลักษณ์เมืองมีศรี มหาวิทยาลัยราชภัฏวไลยอลงกรณ์ และ พล.ต.ผศ.นพ.อารมย์ ขุนภาษี, พอ.รศ.นพ.สุธี พานิชกุล โรงพยาบาลพระมงกุฎเกล้า พร้อมด้วยทีมนักศึกษาสาขาวิศวกรรมเมคาทรอนิกส์นายพรรษวุฒ อ้วนมี นายนราศักดิ์อาจลึก และ นายปนันชัย วันดีพล.ต.ผศ.นพ.อารมณ์ เปิดเผยว่า ปัจจุบัน ผู้พิการอัมพาตครึ่งล่าง(Paraplegia) หรืออาการอ่อนแรงของแขนขาซีกใดซีกหนึ่ง อันเกิดจากความผิดปกติของสมอง เรียกว่า อัมพาตครึ่งซีก(hemiplegia)ไม่สามารถที่จะลุกยืนเพื่อทำกิจกรรมต่างๆ ได้ เช่น สามารถลุกยืนหรือหยิบสิ่งของ ในชีวิตประจำวันหรือประกอบอาชีพเกษตรกรรมบางประเภทตลอดจนตกแต่งกิ่งไม้ที่สูงๆ ด้วยตนเองได้
ทางทีมงานวิจัยจึงต้องการที่จะคิดค้นและพัฒนารถเข็นไฟฟ้าแบบปรับยืนอเนกประสงค์เพื่อผู้พิการ ให้สามารถลุกยืนเพื่อทำกิจกรรมต่างๆ หรือเพื่อให้ดำดงชีวิตเพื่ออยู่ร่วมกับสังคมได้เหมือนปกตินั่นเอง
ด้าน รศ.ดร.เดชฤทธิ์ กล่าวว่า สำหรับการวิจัยและพัฒนารถเข็นไฟฟ้าแบบปรับยืนอเนกประสงค์เพื่อผู้พิการ ต่อยอดและผลงานให้ผู้พิการได้ใช้งานได้จริง โดยรถเข็นรถเข็นไฟฟ้าแบบปรับยืนอเนกประสงค์ประกอบด้วย 3 ส่วนหลัก คือโครงสร้าง (Hardware) ระบบควบคุม(Control System) และซอฟต์แวร์(Software)
โดยระบบโครงสร้างจะประกอบไปด้วย 2 ส่วนคือ 1. รถเข็นไฟฟ้าแบบธรรมดา 2.โครงสร้างรถเข็นแบบปรับยืน จะประกอบไปด้วย ระบบล้อเคลื่อนที่4 ล้อ ลูกสูบเพื่อปรับยืน 2 อัน ชุดคันโยก1 อัน และชุดรัดผู้ป่วยในขณะท่านั่งและท่ายืน สำหรับระบบควบคุม จะประกอบไปด้วย ไมโครคอนโทรเลอร์รีเลย์ สวิตช์ แบตเตอรี่ 12 โวลต์ 2 ลูก และระบบซอฟต์แวร์ จะเขียนด้วยภาษาซี
หลักการทำงาน เมื่อผู้ป่วยนั่งอยู่บนรถเข็น หลังจากนั้นจะเข็นรถเข็นเพื่อให้เข้าใกล้รถเข็นปรับยืนเพื่อรัดช่วงเอวผู้ป่วยและกดปุ่มเพื่อปรับยืน จะทำให้ผู้ป่วยลุกออกจากตัวรถเข็นแล้วมายืนอยู่บนรถเข็นปรับยืนแทน ผู้ป่วยสามารถกดปุ่มเพื่อขับเคลื่อนรถเข็นปรับยืนให้เคลื่อนที่ไปตามทิศทางที่ต้องการได้ เช่น เดินหน้า ถอยหลัง เลี้ยวซ้าย และเลี้ยวขวาได้ตามลำดับ
ถ้าผู้ป่วยต้องการกลับมานั่งรถเข็นธรรมดา ก็จะเข็นรถเข็นมาใกล้ๆ รถเข็นปรับยืน หลังจากนั้นจะกดปุ่มเพื่อให้ผู้ป่วยอยู่ในท่านั่งและปลดชุดรัดเอวออก จะทำให้ผู้ป่วยนั่งอยู่บนรถเข็นธรรมดา และแยกออกจากรถเข็นปรับยืนทันที
สำหรับผู้สนใจรถเข็นไฟฟ้าแบบปรับยืนอเนกประสงค์เพื่อผู้พิการต้นแบบสอบถามรายละเอียดหรือเข้าชมผลงานได้ที่สาขาวิชาวิศวกรรมเมคคาทรอนิกส์มหาวิทยาลัยเทคโนโลยีราชมงคล(มทร.) ธัญบุรี สอบถามรายละเอียดเพิ่มเติมได้ที่โทร. 0-2549-4746






{kind=link}
{kind=link}
{kind=link}
{kind=link}